In other languages
ターゲット
公開日
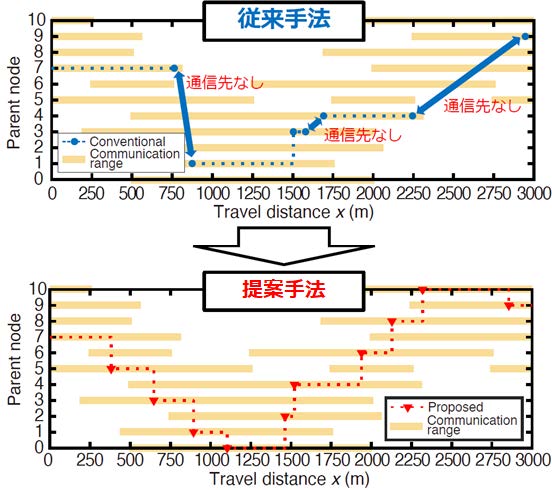
原田博司 情報学研究科教授、正木弘子 同研究員、関谷花音 同修士課程学生らの研究グループは、IoT(Internet of Things:“モノ”のインターネット)向け国際無線通信規格「Wi-SUN FAN」を用い、最大時速68kmで走行する移動体から各種センシング情報および位置情報を広域に収集・管理するための、最適ノード選択・通信経路構築アルゴリズムを開発しました。さらに、本アルゴリズムを実装した移動体センシングシステムを構築し、自律歩行型ロボットを用いた実証に成功しました。
画像
研究者情報
研究者名
原田 博司
研究者名
Hiroko Masaki
関連部局



