水元惟暁 農学研究科 博士課程学生(現・アリゾナ州立大学・日本学術振興会海外特別研究員)、土畑重人 同助教の研究グループは、シロアリのオスとメスが異なる歩行パターンを状況に応じて使い分けることで、パートナーとの遭遇効率を上げていることを発見しました。
探しているものの居場所がわからないとき、動き方で遭遇確率が決まります。効率のよい動き方は状況に応じて変化するため、生物の探索効率を調べるには、その生物をとりまく状況を明確にする必要があります。
本研究ではシロアリの配偶者探索には2つの状況があることに着目し、行動を定量化することで、相手がどこにいるか全く分からないときには、オスもメスも活発に動いて探索する一方で、相手が少なくとも近くにいると分かっている場合には、オスが動き、メスがその場に留まることを発見しました。さらに、シミュレーションにより、観察された歩行パターンの切り替えが、実際に遭遇効率上昇に寄与していることを示しました。
本研究成果は、生物の探索行動における理論と実証とを結びつけた点で重要な価値を持つと考えられます。
本研究成果は、2019年6月20日に、国際学術誌「Science Advances」のオンライン版に掲載されました。
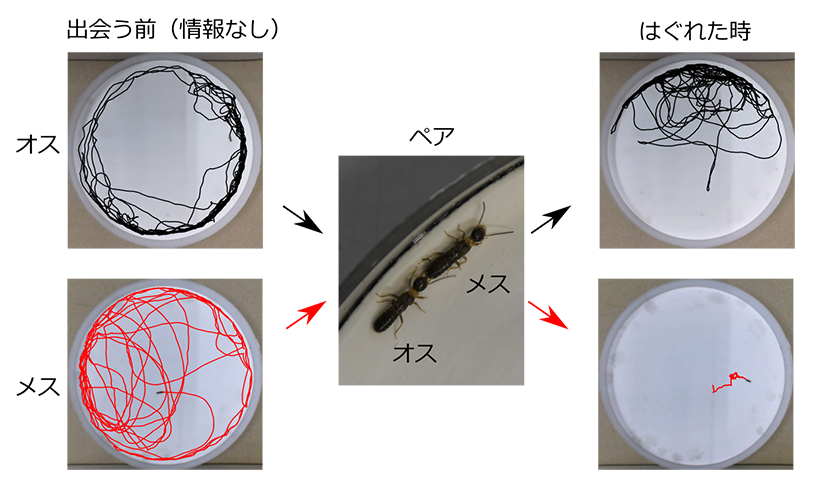
図:状況に応じたシロアリの歩行パターンの変化
詳しい研究内容について
書誌情報
【DOI】 https://doi.org/10.1126/sciadv.aau6108
【KURENAIアクセスURL】 http://hdl.handle.net/2433/242939
Nobuaki Mizumoto and Shigeto Dobata (2019). Adaptive switch to sexually dimorphic movements by partner-seeking termites. Science Advances, 5(6):eaau6108.



