青井伸也 工学研究科講師らの研究グループはムカデを模した多足ロボットと数理モデルを用いて、体軸を真っ直ぐにした直線歩行が歩行速度や体軸柔軟性に応じて不安定化し、この不安定性が急旋回のような素早く機敏な運動を可能にすることを明らかにしました。本研究のような数理モデルやロボットを用いた研究方法は、生物の巧みな運動生成メカニズムの解明に大きく寄与すると期待されます。
本研究成果は、2016年7月22日18時に英国の学術誌「Scientific Reports」に掲載されました。
研究者からのコメント

青井講師
本研究では、ムカデのような多くの足を用いた多足歩行において、分岐による直線歩行の不安定性が急旋回のような素早く機敏な運動生成に寄与することを数理モデルやロボットを用いて明らかにしました。このような力学特性を利用した運動機能の向上は、生物の優れた運動戦略として重要な示唆を与えるものです。生物はその複雑な筋骨格系を制御して巧みな運動を実現していますが、その力学原理には多くの謎が残されています。数理モデルやロボットを用いた方法は、生物の巧みな運動機能の未解決な問題に対して、新たな方法を提供すると期待されます。また、シンプルな制御ながら力学特性を効果的に利用することで高性能な運動機能が実現できるなど、このような研究から得られる知見は、人工物の新たな制御系の開発にも役立つと期待されます。
概要
ムカデは多くの足を持つ節足動物です。歩くときは、重力に抗して身体を支え、推進力や減速力を得るために、多くの足が地面に着いています。その際、これらの足は地面に拘束されてしまうため、急旋回のような素早く機敏な運動を行う障害となり得ますが、実際のムカデは非常に敏捷に歩きます。ムカデのような多くの足を用いる機敏な歩行生成メカニズムは未だ不明確です。
近年、本研究グループはムカデの数理モデルを用いて、体軸を真っ直ぐにした直線歩行が歩行速度や体軸柔軟性(体節を繋ぐバネのバネ定数の逆数)に応じて不安定化し、蛇行運動に遷移することを明らかにしました。速度や柔軟性といったパラメータの変化により安定な状態が崩れ、蛇行運動のような安定な周期的振る舞いが新たに現れることを「ホップ分岐」と呼びます。本研究では、この分岐による直線歩行の不安定性が急旋回のような素早く機敏な運動を可能にすることを、多足ロボットを用いた実験を通して明らかにしました。身体特性などの制御による不安定性を利用した運動機能の向上は、生物の優れた運動戦略として重要な示唆を与えるものです。
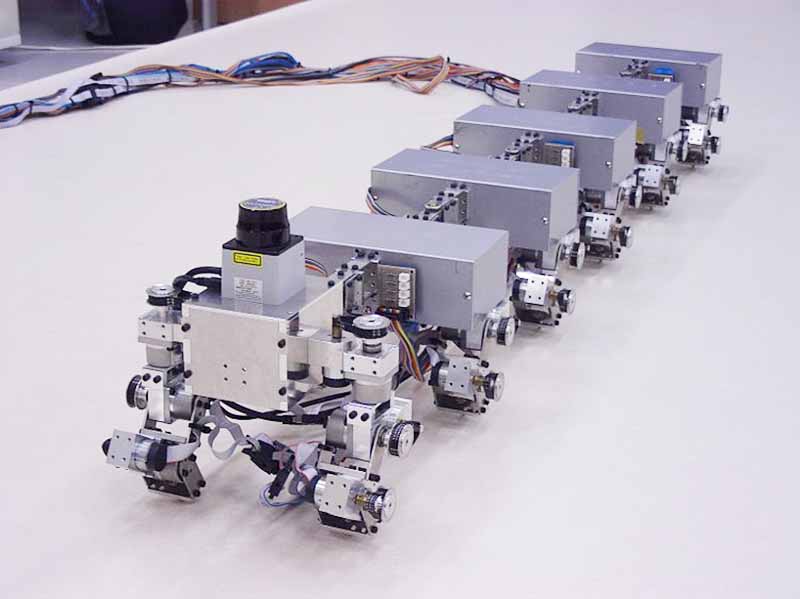
検証に使った多足ロボット
詳しい研究内容について
大きい体軸柔軟性による蛇行運動の発生
急旋回実験
書誌情報
【DOI】
http://dx.doi.org/10.1038/srep30199
【KURENAIアクセスURL】
http://hdl.handle.net/2433/216072
Shinya Aoi, Takahiro Tanaka, Soichiro Fujiki, Tetsuro Funato, Kei Senda & Kazuo Tsuchiya. (2016). Advantage of straight walk instability in turning maneuver of multilegged locomotion: a robotics approach. Scientific Reports, 6: 30199.
- 京都新聞(7月23日 27面)、産経新聞(8月10日 21面)、日刊工業新聞(7月26日 29面、9月14日 25面)、日本経済新聞(7月25日 13面)に掲載されました。



