片山想太郎 情報学研究科博士後期課程学生、大塚敏之 同教授、トヨタ自動車株式会社らの研究グループは、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル予測制御)の高速アルゴリズムの開発に成功しました。
時々刻々変化する状況に応じて、最適な未来の動きを実時間で計算しながら制御を行うモデル予測制御は、自動運転や電力システムなど幅広い応用に向けて活発に研究されています。しかし、制御対象のモデルが離散事象を伴うときには場合分けが生じ、計算が膨大になるため、モデル予測制御の実現は困難でした。このような例としては、地面と足の接触に応じて速度が不連続に変化し、運動方程式が切り替わる2足歩行ロボットがあげられます。
本研究で提案したアルゴリズムでは、離散事象を含む最適な予測動作全体の計算と、予測した離散事象の系列の変化に応じた部分的な動作の修正を組み合わせることで、効率的な計算を行うことに成功しました。このアルゴリズムによって、離散事象を伴う制御対象にモデル予測制御を適用することが可能になり、ロボットや化学プロセスなど、身の回りの様々な離散事象を含む制御システムの性能を限界まで引き出すことが可能になります。
本研究成果は、2019年11月5日に、国際学術誌「International Journal of Robust and Nonlinear Control」のオンライン版に掲載されました。
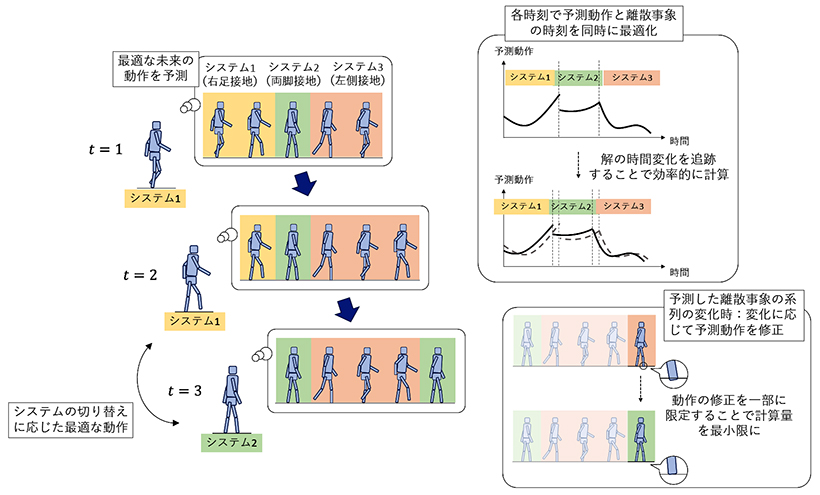
図:本研究の概要図
詳しい研究内容について
書誌情報
【DOI】 https://doi.org/10.1002/rnc.4804
【KURENAIアクセスURL】 http://hdl.handle.net/2433/244784
Sotaro Katayama, Masahiro Doi and Toshiyuki Ohtsuka (2019). A moving switching sequence approach for nonlinear model predictive control of switched systems with state‐dependent switches and state jumps. International Journal of Robust and Nonlinear Control. 30(2), 719-740.



